|
|
|
|
モーターグライダーを設定してみる
今回は、OpenTXの使いこなし編です。
実際にフラップ付のモーター・グライダーを設定し、OpenTXの豊富な機能をどのように使うか?を解説します。
「どのような機能を設定するのか?」
題材とするのは、スケール・グライダーSaltoです。これまではJR PCM-9XIIで設定し飛行させていました。
これを今回、OpenTXで再設定します。SaltoはVテールの尾翼を持ち、スポイラーはなくフラップを装備。平地でも飛ばせるように機首にはモーターを装備しています。やや癖のある機体ですが、これを飛ばしやすく、ダイナミックなアクロバットが出来るように設定していきます。
まず、どのように設定するのか?必要な機能を整理し、一表にまとめるところから開始します。OpenTXを使用する場合に限らず、コンピューター・プロポでいろいろ複雑な設定をしていく場合には、途中で訳が分からなくならないように、これはとても大切な作業のひとつです。
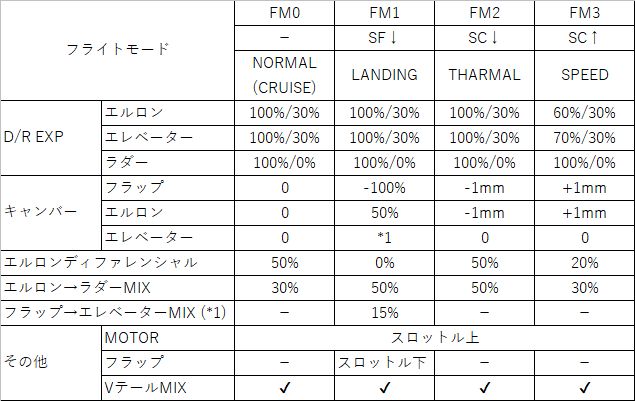
グライダーとして必要なフライトモードは4つを設定します。
ノーマル(クルーズ)モード
エルロン、フラップは基本の位置です。スムーズに旋回させるため、エルロン・ディファレンシャルとエルロン・ラダーミキシングを設定します。
着陸時に使用するランディングモード
フラップを下げ、両方のエルロンを跳ね上げてブレーキとします。フラップを下げることによるアップ癖を打ち消すため、フラップの作動角に応じて、エレベーターへダウンミキシングをかけます。スピードモード
速度を上げて軽いアクロをやることを想定します。エルロン、フラップはやや後縁を上げ、抵抗が少なくなるように設定。エルロンの作動角はやや控えめ(デュアルレート)にします。軸の通ったロールを行うためエルロン・ディファレンシャルはやや小さめ、エルロン・ラダーミキシングもやや控えめにします。サーマルモード
まあ、この種の機体ではほとんど使用することがないかもしれませんが、サーマルの中で滞空するために最適なモードです。エルロン、フラップをやや下げ、揚力を増すように設定します。エルロン・ディファレンシャル、エルロン・ラダーミキシングはクルーズよりも増す必要があるでしょう。最後に、それぞれのモードをどのスイッチで切り替えるかを決めておきます。
筆者は、右の長いスイッチCでSPEED、NORMAL、THARMALを、左奥のスイッチFでLANDINGモードの切り替えを行っています。また、モーター及びフラップはともにスロットル・スティックに割り当て、スティック中立~上でモーター作動、ランディングモードの時のみスティック中立~下でフラップが作動するように設定しています。
モーターが常にスティック上半分だけで作動するようにする目的は、通常時、大きなエルロン操作をしたときにスティックが最下方より少し上がってしまっても不意にモーターが作動しないようにすることと、ランディングモードにおいて急な着陸やり直しの場合でもスイッチの切り替えなしにモーターONにできるようにするためです。(これは筆者のお勧めです) おっと、Vテールの設定も忘れちゃいけませんね!これらの設定をまとめてみたのが次の表です。
「基本のモデルを作成する」
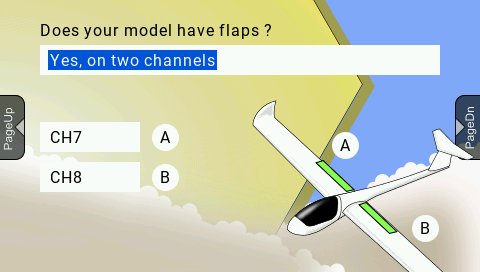
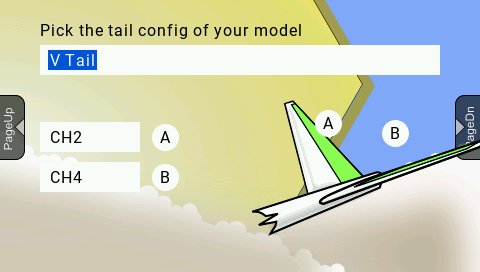
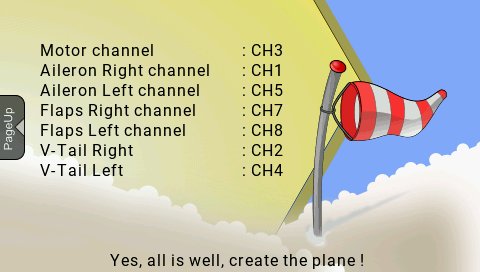
前回同様、基本的な設定をWizardに任せて作ってみます。 今回は、2エルロン、2フラップ、モーター付、Vテールです。設定に間違いがなければ、Yesボタンを選択すると、自動的にこのモデルが作成、選択されます。
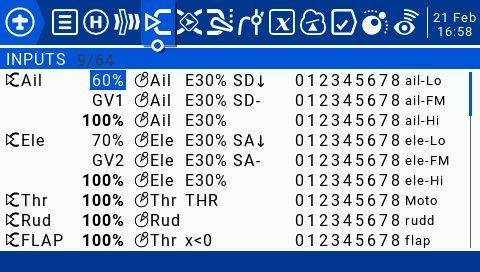
「基本設定内容の確認」
「MDL」ボタンで各メニューに設定された内容をさらっと見てみましょう。 INPUTSページでは、各舵の動きをどのスティックで操作するか?が設定されています。 ここでは、「舵面」ではなく、「機能」として設定されていることに注意! 例えば、Vテールは左右の「舵面」ではなく、エレベーター、ラダーという「機能」に対してスティックが割り当てられているのがわかります。
MIXESページでは、INPUTSページで割り当てられた各機能をどのChにどのように出力するかが設定されます。
VテールはCH2とCH4です。エレベーターとラダーから50%ずつミキシングをかけて、 Vテールの設定を実現しているのがわかります。
なお、初期設定ではフラップはCH7とCH8で、スイッチAで動作させるようになっている。
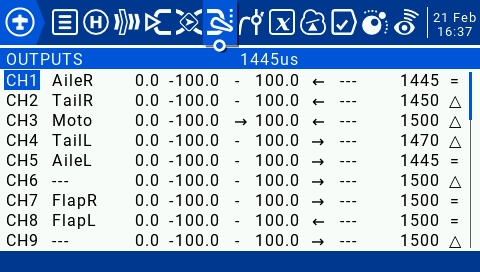
OUTPUTSページではサブトリム、サーボ動作量、リバース・スイッチ、ニュートラル調整、等機械的な調整が行えます。 これらの3ページが基本です。その他のページには設定がありません。
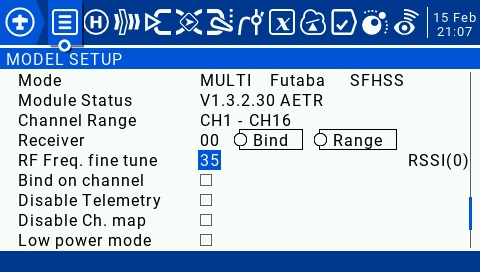
「MODEL SETUP」
さて、基本の設定を確認したところで、ここから意図するように設定を変更・入力していきます。 まず、MODEL SETUPのページで行うことは、
(1) Model name, Model Image:
Model NameはModelXXと設定されていますので、「Salto」と書き直しておきましょう。Model imageは、SDカードの中にある画像データから選択して表示させることが出来ます。もちろん、自分で作成した画像データも表示できます。
(2) Internal RF:
内臓マルチプロトコル・モジュールを使用する受信機に合わせ設定します。設定の詳細とバインド方法は、モジュール・メーカーのホームページ https://github.com/pascallanger/DIY-Multiprotocol-TX-Module/blob/master/Protocols_Details.md にて確認が必要です。
筆者はフタバS-FHSS互換のCorona受信機を使用しましたが、バインドするためには周波数の微調整が必要でした。
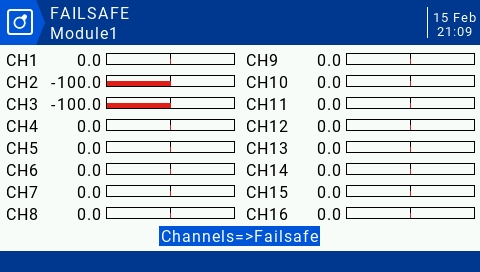
(3) Failsafe:
すべての設定が終わったら飛行前に必ず設定しましょう。Custom Setにて、スロットルOFF、エレベーターFULLUP、ラダー左右どちらかFULLなどで、ゆっくりスピン状態で降下するような設定が望ましいでしょう。 注:プロトコルによってはFailsafeが使用できないものもあります。
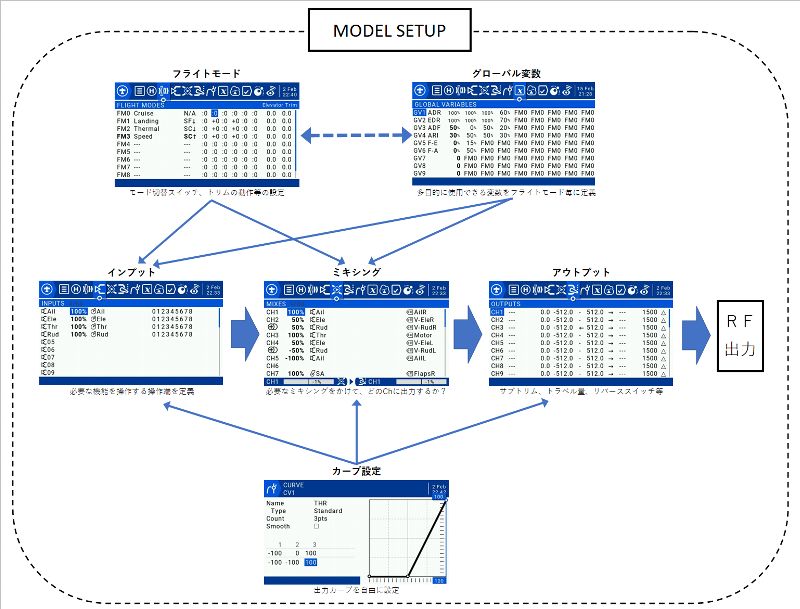
「フライトモード、出力カーブ設定、グローバル変数」
ここで、前回紹介した各ページの繋がりを思い出してみましょう。今回はこれらのページの意味するところを理解し使いこなすことを目的とします。
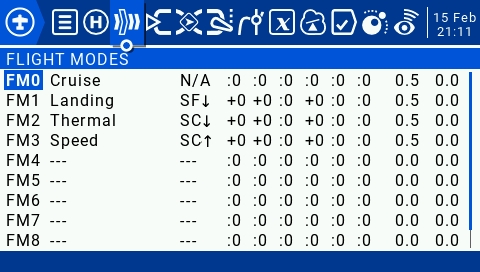
(1) FLIGHT MODES:
フライトモードの基本設定を行います。このページで設定するのは、
・フライトモードの切り替えはどのスイッチで行うのか?
・フライトモード毎のトリムの振る舞い の2点です。
まず、FM0が基本となり、何も設定しなければFM0のみが使われます。今回はFM0をNORMAL(CRUISE) MODEとし、FM1以降を必要に応じて設定します。
・FM1:LANDING MODE スイッチSF↓
・FM2:THARMAL MODE スイッチSC↓
・FM3:SPEED MODE スイッチSC↑ と設定します。
FM1以降のスイッチ設定は上の行が優先となるため、スイッチCがどの位置にあっても(どのフライトモードであっても)スイッチFを手前に引くことでLANDING MODEになります。スイッチFを向こう側に戻せば、スイッチCによるモード切替えが有効になります。
:0という数字がいっぱい並んでいますが、これは、各舵に対するトリムの振る舞いを表しています。:0とは、FM0のトリム値が使われる(共通)ということです。FM毎に独立にしたければ、そのFMの値(FM1であれば:1)に変更します。
また、面白いのは、+0という設定があることで、これは、FM0のトリム値を初期値とし、そこから微調整することが出来る、というもので、FM0で大きくトリムを動かしてしまった場合に便利です。
-- という設定は、そのFMではトリムは作動しない、という意味になります。
最後の2つはFade in、Fade outという設定で、FMが切り替わる時間を設定できます。大きくトリムを動かした場合などに、FM切替えでいきなり機体姿勢が乱れるのを防ぐことが出来ます。 今回は、ラダー、エレベーターとエルロンのFM1,2,3について、トリムを+0、FM0,1,2,3のFade in時間を0.5秒の設定とします。
(2) GROVAL VARIABLES:
グローバル変数といい、多目的に使用可能な数値をフライトモード毎にGV1~GV9の9つまで設定できます。表示は左から、FM0に設定する数値、順にFM1、FM2…と続きます。表中のFM0とは、FM0に入力した数値がそのまま使われるということです。
これらの数値を設定しておけば、INPUTSやMIXESページで数値入力すべき個所にGV1などと入力することにより、フライトモード毎に違う設定が一度に定義可能です。 グローバル変数はOpenTXで特徴的な機能です。これを使いこなせば、かなりOpenTXをマスターしたと言ってもよいでしょう。
今回は以下の8つを設定しました。
GV1 エルロン・デュアルレート FM3(Speed)で60%
GV2 エレベーター・デュアルレート FM3で70%
GV3 エルロン・ディファレンシャル FM0(Normal)およびFM2(Tharmal)で50%、FM1(Landing)で0%、FM3で20%
GV4 エルロン→ラダー・ミキシング FM0,FM3で30%、FM1,FM2で50%
GV5 フラップ→エレベーター・ミキシング FM0は0%、FM1のみ-15%
GV6 エルロン左右跳ね上げ量 (FLAPからAILERONへのミキシングとして、) FM1で-50%
GV7 エルロン・オフセット FM2で-4.0、FM3で4.0
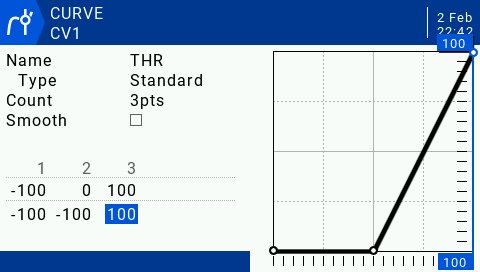
GV8 フラップ・オフセット FM2で-5.0、FM3で5.0(3) CURVES
ヘリのスロットル・カーブ、ピッチ・カーブをイメージしていただけると良いでしょう。
OpenTXでは必要に応じて32個ものカーブを作ることが出来、INPUTS、MIXES、OUTPUTSどの設定ページでも活用できます。なお、エクスポネンシャル、ディファレンシャルなどの基本的カーブはCURVESを使わなくても、INPUTS、MIXES画面に準備されています。
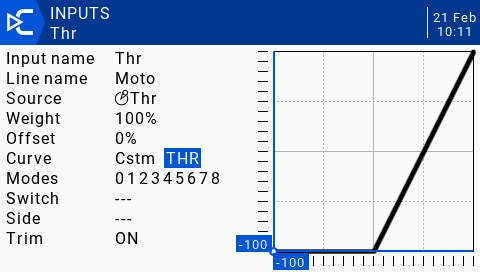
今回作成するのは、スロットル・スティックを中央以上でモーター・コントロールをするためのカーブ(下写真)と、フラップ・オフセットに使用する出力ゼロのカーブです。
次は、基本のINPUTS、MIXES、OUTPUTSの各ページに戻り、詳細の設定をしていきます。
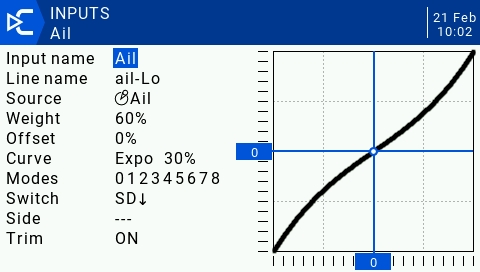
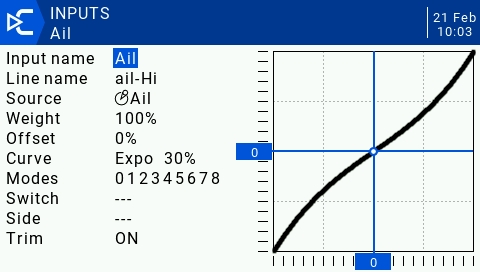
「INPUTSページの設定」
ここでは、デュアルレート、エクスポネンシャルの設定、ならびに、定義されていない入力端を定義していきます。
まず、エルロンの設定を見てください。 デュアルレートの切り替えには、スイッチDを使います。
SD↓ではD/R(Weight) 60% EXP 30%(強制)
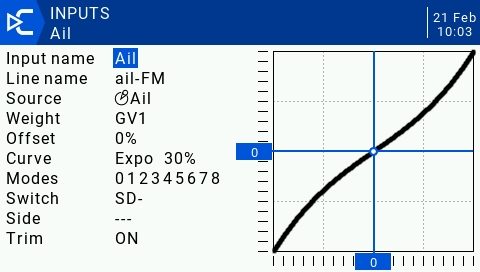
SD- (中央)では、FM毎に設定したD/R値(GV1)、EXP 30%
SD↑ではD/R(Weight) 100% EXP30%(強制) とします。
スイッチDを下でLOモード
スイッチD中央でFMごとの設定(GV1)
HIモードはスイッチ指定をしない
INPUTSページでは、1つの機能に設定できる入力は1つだけです。最上行が優先で、その行の条件が成立しなければ次の行、というふうに処理が移っていきます。
上記の例では、スイッチDを指定して3つの処理を切り替えていますが、もし、スイッチDが飛行中に壊れてしまったら処理が止まって操舵が全く効かなくなってしまう可能性があります。そこで、OpenTXのマニュアルでは最下行にスイッチに依存しない処理を1行加えることを推奨しています。ここでは、最下行のSD↑の指定を削除します。これにより、SD↓の場合、SD-(中央)の場合、それ以外の場合(つまり、SD↑と同等になる)という指定になります。エレベーターも同様の考えで設定します。
スロットルは、先に設定したスロットル・カーブを適用しますので、CurveでCstm、THRを選択します。ちなみに、先にCV1を設定するときに「THR」と名前を付けておけば、ちゃんとカーブ選択時に「THR」と表示されますので間違いがありません。
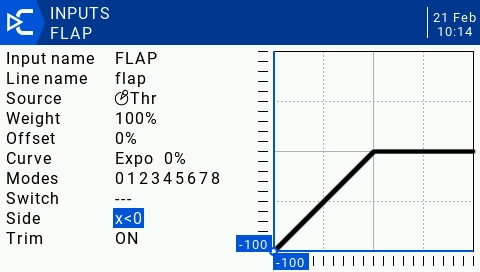
INPUTSページではフラップの動作が定義されていませんので、05番に新規に定義してやります。
スロットル・スティックを使用するよう設定しますが、中立より下のみフラップが動くようにしたいので、SideをX<0と設定します。side x<0とは、入力が0より少ない時は作動するという意味。動作がグラフで表示されるので一目瞭然!
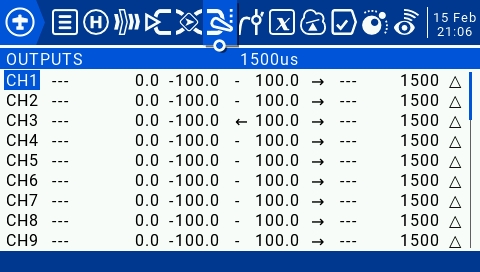
「OUTPUTSページでの動作確認」
いろいろなミキシングをかける前に、まずOUTPUTページで各舵の動作確認を行うと良いでしょう。
まず、リバース・スイッチでサーボの動作方向を合わせてください。受信機がFUTABAの場合、モーターChをリバースにするのを忘れないこと!
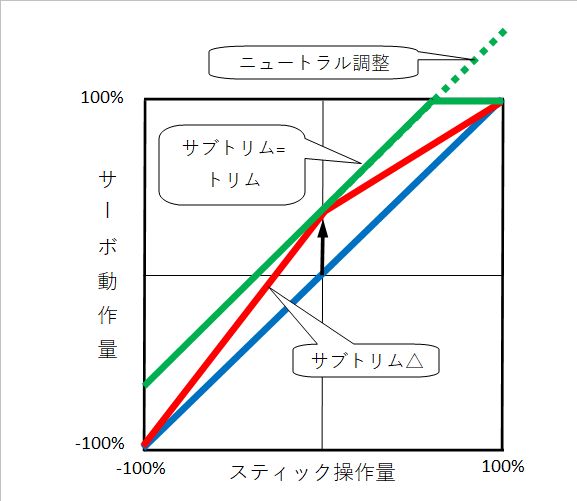
次にサーボ・ホーンの傾きを調整しますが、これはサブトリムではなくニュートラル調整(PPMcenter)を使用します。
OpenTXでは、トリムの動作がやや特殊です。右端のマークが△の場合、サブトリムはニュートラル位置のみが変化し、サーボの動作幅は変わらず、サーボ動作の傾きが変化します。マークが=の場合と(通常の)トリムの場合は、ニュートラル位置が変化し、動作の傾きも変わらないため、スティックがフルストロークに達する前に動作量が100%でリミットされるか、反対側は動作量が100%に達しません。
これに対し、ニュートラル調整の場合、サーボの動作ストロークがそのままシフトするため、通常、サーボ・ホーンの傾きを微調整する場合は、サブトリムではなくニュートラル調整機能を使うべきです。次のグラフを参照してください。
使用するCHに名前を付けておくと間違いがない。
「MIXESページでの設定」
基本のミキシング(VテールMIX)に加え、入力、書き換えが必要なのは以下の項目です。
・エルロン・ディファレンシャル(Ch1.5)
・エルロン→ラダーMIX(Ch.2,4)
・フラップ(CH.7,8) (FM1)
・フラップ→エレベーターMIX(Ch.2,4)
・エルロン舵面跳ね上げ(Ch.1,5)
・キャンバー・コントロール(エルロン(Ch.1,5)、フラップ(Ch.7,8))
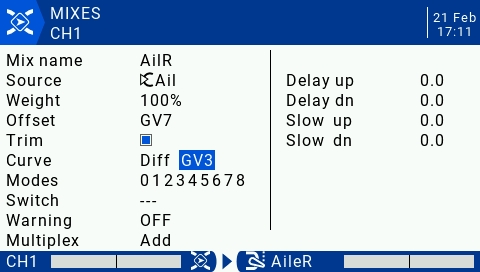
順番に解説しましょう。(1) エルロン・ディファレンシャル
Ch.1と5の設定を少し書き換えます。 Weightは100%、Curveのところに、Diffと、数値の代わりに先に定義したGV3を入力します。
画面最下行に表示される入力値と出力値のバー・グラフを参照しながら設定すると間違いがないでしょう。 これで、フライトモード別に設定されたエルロン・ディファレンシャル値が自動的に適用されるようになります。設定ページの後半に表示されるModes、Switchを設定する必要がありません。舵面位置調整(キャンバー・コントロール)もOffset値にGV7を指定することでこれを反映しています。
GVを使いこなすことで、ミキシング設定をかなりシンプルにすることが出来ます。
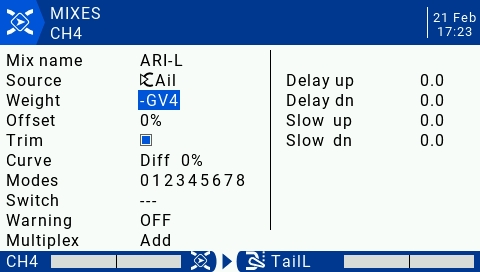
(2) エルロン→ラダーMIX
Ch2.4に新規に設定します。ラダー(R-Tail、L-Tail)を動かすのですが、SourceはAilを指定し、WeightをGV4と設定します。もしどちらかのラダーが逆方向に動く場合は、Weightを-GV4とすればOKです。
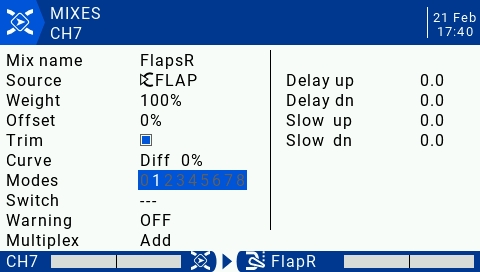
(3) フラップ
Ch.7,8に設定します。初期状態ではフラップのスイッチとしてスイッチAが設定されていましたが、フラップ操作にはスロットルを使いたいため書き直します。
INPUTSでFLAP(機能)をスロットルで定義しましたから、SourceをFLAPとし、Weightを100%とします。フラップを動かしたいのはランディング・モード(FM1)だけですから、Modes項の1以外をグレーアウト(無効)にしておきます。また、どちらかのフラップが逆方向に動く場合は、そのChのWeightを-100%にします。
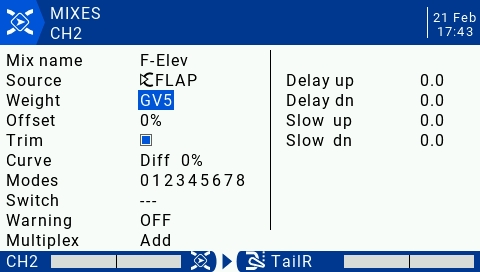
(4) フラップ→エレベーターMIX
Ch.2,4に設定します。V-Tailなので、左右の舵面に対して設定する必要があります。
SourceをFLAP、WeightをGV5とします。これで、ランディング・モード(FM1)の時だけミキシングがかかります。 ミキシング量をGV5で設定しているので、これを変更することで簡単にミキシング量の調整をすることが出来ます。
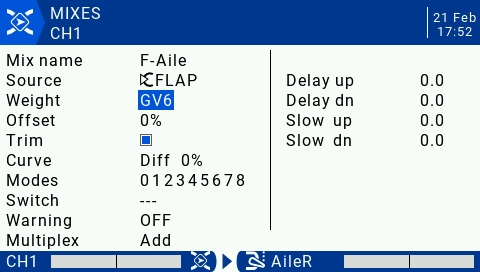
(5) エルロン舵面跳ね上げ
ランディング・モードのみで必要なミキシングですが、これもGV値で設定しているので、後の調整が簡単です。
Ch.1,5にそれぞれ、SourceをFLAP、WeightにGV6のミキシングを設定します。
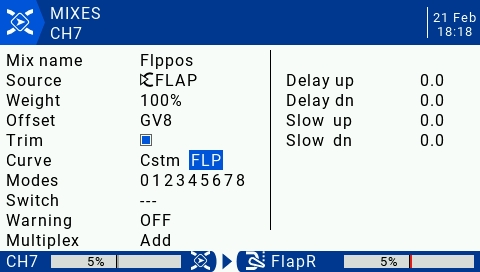
(6) キャンバー・コントロール
エルロン(Ch.1,5)の設定ページ(1)にもう少し手を加えます。
OFFSET項の0%をGV7に変更します。すると、各フライトモードの舵面中立位置をGVで設定した位置に移動させることが出来ます。
フラップ(Ch.7,8)も同様にOFFSET項にGV8を適用しますが、こちらはやや面倒です。 スロットル位置に連動せずにオフセットだけを適用させたいため、CurveをCstmとし、先に作成したフラットなカーブ「FLP」を設定します。
MIXESページでは、Chごとの設定ページ下部に現在の入力値とミキシングをかけた状態の出力値がバーグラフで表示されます。これをよく見てミキシングの方向や量が正しいか?よく確認しながら設定を進めてください。
「動作確認」
これですべての設定が終わりました。 受信機の電源を入れ、実際に舵面の動作を確認します。
モーター・グライダーですので、誤ってプロペラを回転させないよう、必ずプロペラは外しておきましょう。受信機と動力用電源が別であれば更に安心です。
一度基本的な動きは確認しているはずですね? サーボの動作方向、動作量は適切でしょうか? もし違っていたら、ミキシングの方向が違っているかもしれません。確認してください。 良ければフライトモードを切り替え、デュアルレート、ディファレンシャル、ラダー・ミキシング量の変化を確認します。何をどのように設定したか?初めに作った一覧表が役に立ちます。
動作量が不適切であれば数値を調整してください。 今回はグローバル変数を最大限活用しているので、ほとんどGV値を調整することで事足りると思います。もしGV値を使っていなければ、INPUT、MIXESページに記載した多くの項目の設定値をそれぞれ正しく書き換えなければなりません。
エルロン、フラップ、Vテールなど、左右それぞれのChがあるものは特に注意しなければなりません。 FM1(ランディング・モード)を選択し、スロットルの動きに追従して、フラップ、エルロンが正しく動くかどうか確認します。特にフラップは左右の動作量を正確に合わせる必要があります。もしうまく合わない場合は、OUTPUTSページのサーボ動作ストロークで調節してください。
「今回のまとめ」
OpenTXとそれをインストールした送信機はとてもよく出来ています。 豊富な機能を持ち、これを使いこなせば、国産最高級プロポに勝るとも劣らない設定が出来、加えて、多くの変調方式(プロトコル)に標準で対応しているので、これ1台でいろいろな受信機がそのまま使えてしまいます。これは、飛行機、ヘリコプター、ドローンなど様々な種類、様々なメーカーの模型、複数の送信機を所有しておられる一般のユーザーにとって大きなメリットでしょう。
ソフトウェアで動作するコンピューター・プロポで心配なのは、処理速度と安定性です。 今のところ、筆者の環境では、これだけの設定を行っても処理が重くなったとか、サーボの動作が遅れるなどということは感じていません。複数のモデルを切り替えるときも十分高速ですし、今のところ、送信機自体がフリーズしたりうまく起動しなくなったりするようなトラブルにも遭遇していません。
ただし、安心してはいけません。多くの送信機、受信機にきちんと対応するFirmwareを作るのはとても大変なことなのだろうと思います。どこかにバグ(不具合)が潜んでいる可能性は否めません。
筆者が経験したのは、Failsafeの設定内容がすべて逆に再現される(スロットルOFFに設定すると、フルハイになる!)などというとんでもないものがありました。これは、OpenTXのフォーラムにおいて質問し、モジュールのFirmware開発者の方から詳細なサポートを得られ、Firmwareのアップデートをしていただき解決しました。 事実、OpenTXおよび送信機のマルチモジュールのFirmwareはかなり頻繁にアップデートされており、その更新内容を見ると「○○の不具合を修正」などという項目がいくつか見られます。OpenTXを導入しようとする場合、その豊富な機能を享受できる反面、遭遇する(かもしれない)トラブルさえも楽しみ、解決していこうという積極的な気持ちを持つことが必要かもしれません。
次回は、「もっと楽しく!OpenTXのカスタマイズ」と題して、OpenTXの楽しい使いこなし、小技を解説します。
 |
 |
 |
||
| TOP | BACK | MENU |